Ton nœud est synchronisé et connecté à huit pairs. Ça semble tout bon !
Pour que ton nœud miroir soit plus utile, tu peux rendre les API libp2p et RPC publiquement accessibles. Je ne sais pas si la documentation est prête à ce niveau, sinon, les réponses se trouvent éparpillées sur ce forum.
j’ai bien vu la doc et j’ai regardé les vidéos à 1 image/s
mais il me manque quels ports => pour quoi
et si c’est tcp ou udp ou les deux
et si ils sont publics ou privés
je n’ai pas su trouver
j’ai imaginé faire une doc d’instal => debian , docker, datapod avec aussi les fichiers config.
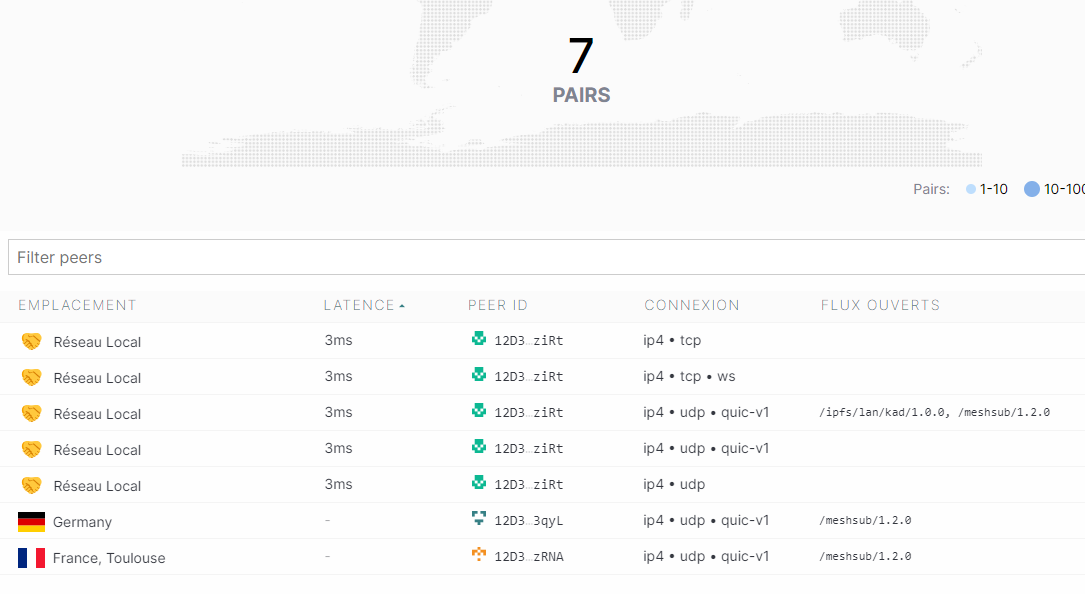
le nombre de pair (2 réels) me semble peu, c’est normal ?
srv600938.hstgr.cloud [62.72.19.140]
et
jma42-6_migr-78-199-27-8.fbx.proxad.net [78.199.27.8]
L’algorithme qui établit le nombre de connexions n’est pas encore clair pour nous.
Certains nœuds ont 16 à 32 connexions, tandis que d’autres se trouvent entre 9 et 11.
Le fait qu’il soit possible d’établir une connexion entrante au nœud sans blocages tel l’absence de redirection de port peut-être un frein.
Sinon, c’est le fait d’être listé comme bootnode a peut-être une influence.
Ce que tu as installé est un « client » Substrate ou un « nœud » Duniter dans notre jargon « v1 ». Ce dernier fait tourner la chaîne de blocs.
Un « DataPod » est un autre logiciel et service de l’écosystème pour y stocker des informations tel une image de profil. En v1, c’est Cesium+, en v2, il y a ce projet nodes / Duniter Datapod · GitLab
Autrement, oui, ton installation est fonctionnelle. As-tu redirigé le port libp2p, si tu as une box devant ta machine et/ou ouvert le port dans le firewall de la machine ?
ok pour le vocabulaire.
j’ai installé un truc identifié comme
duniter-mirror:
image: duniter/duniter-v2s-gdev-800:latest
avec
kubo:
image: h30x/datapod-kubo
et
kubo-rpc:
image: h30x/datapod-kubo-rpc
donc ce doit être un noeud duniter en miroir, je pense.
par habitude…(pour moi) un “client” est côté utilisateur final
–
pour les ports, à la fin, pour me prendre un peu moins la tête, j’ai ouvert tous les ports identifiés dans docker-compose sauf le port 5001 uniquement sur le rle
faut que je teste pour réduire, ce n’est pas encore propre